P.R.O.P.
MXET 375 Applied Dynamic Systems & ESET 349 Microcontroller Architecture Project
- Developed ARM 7 Assembly code to drive a DC motor, disconnect the battery at steady state, and short the motor to induce rapid deceleration via back-EMF, causing motor deceleration and threaded release of propeller.
- Utilized ARM 7 Assembly to enable a timer on the microcontroller for controlling a hobby servo motor, which rotated a control knob to adjust the input voltage of the system.
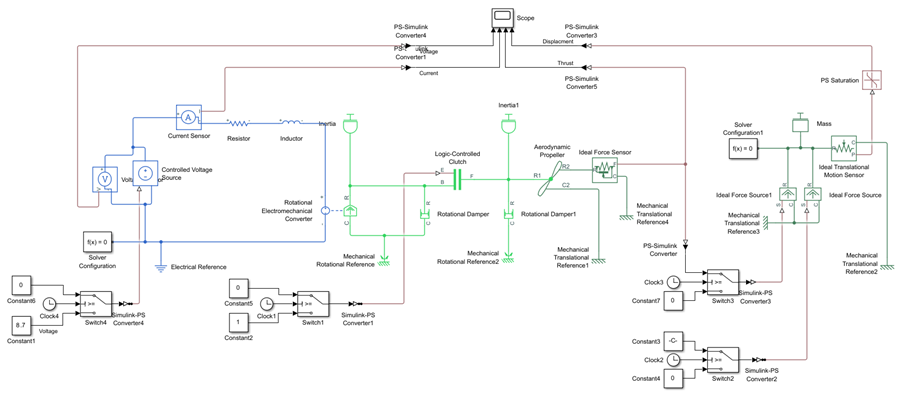
- Modeled and simulated the electromechanical dynamic system in Simulink, integrating rotational and translational equations of motion.
- Designed a thread-based launch system in Fusion 360, enabling secure coupling and timed release of the propeller.
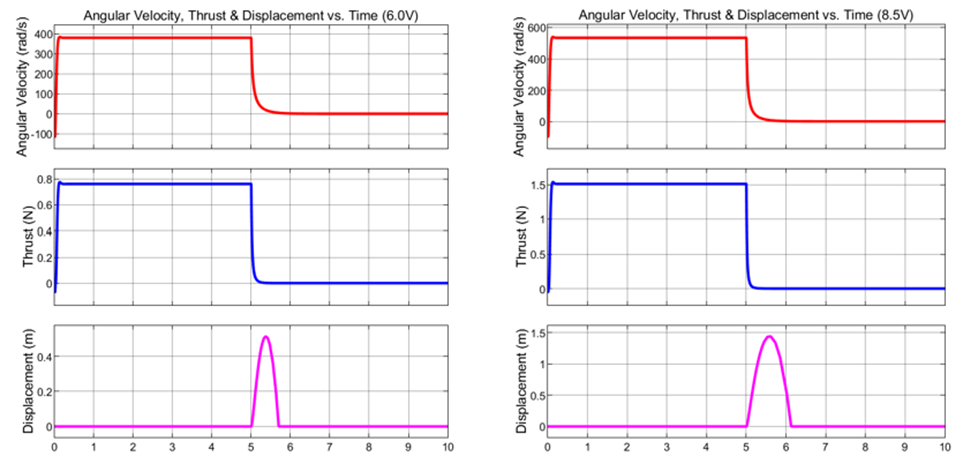
- Performed experimental validation of system dynamics, achieving close correlation between simulated and measured heights at different voltages.
- Collaborated with teammates: Caleb Martin and Siddharth Ganti.
- View the detailed project report here.
Assembly Code (.txt files)


 ← Return to Main Page
← Return to Main Page